1. 什么是伺服系統?
伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。
它的主要任務是按控制命令的要求、對功率進行放大、變換與調控等處理,使驅動裝置輸出的力矩、速度和位置控制非常靈活方便。在很多情況下,伺服系統專指被控制量(系統的輸出量)是機械位移或位移速度、加速度的反饋控制系統,其作用是使輸出的機械位移(或轉角)準確地跟蹤輸入的位移(或轉角),其結構組成和其他形式的反饋控制系統沒有原則上的區別。
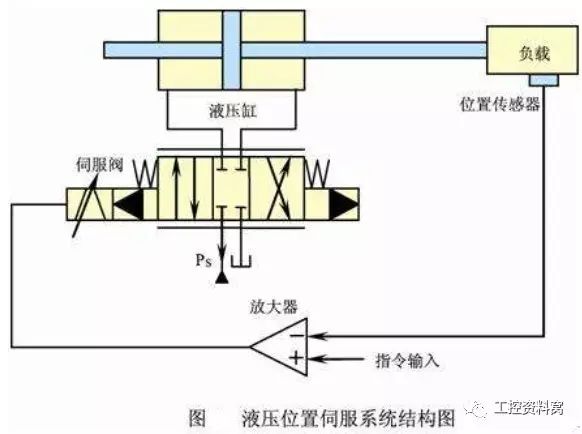
注意:伺服系統不單單指以伺服電機構成的電氣伺服系統,還有以伺服閥構成的液壓伺服系統。本文主要介紹伺服電機系統。
2. 什么是伺服電機?與步進電機有何不同?
伺服電動機又稱執行電動機,在自動控制系統中,用作執行元件,把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類。其主要特點:當信號電壓為零時無自轉現象,轉速隨著轉矩的增加而勻速下降。
伺服電機與步進電機的特點比較:
控制精度不同
兩相混合式步進電機步距角一般為3.6°、1.8°,五相混合式步進電機步距角一般為0.72°、0.36°。也有一些高性能的步進電機步距角更小。如四通公司生產的一種用于慢走絲機床的步進電機,其步距角為0.09°;德國百格拉公司(BERGERLAHR)生產的三相混合式步進電機其步距角可通過撥碼開關設置為1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了兩相和五相混合式步進電機的步距角。
交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證。對于帶標準2500線編碼器的電機而言,由于驅動器內部采用了四倍頻技術,其脈沖當量為360°/10000=0.036°。對于帶17位編碼器的電機而言,驅動器每接收217=131072個脈沖電機轉一圈,即其脈沖當量為360°/131072=9.89秒。是步距角為1.8°的步進電機的脈沖當量的1/655。
低頻特性不同
步進電機在低速時易出現低頻振動現象。振動頻率與負載情況和驅動器性能有關,一般認為振動頻率為電機空載起跳頻率的一半。這種由步進電機的工作原理所決定的低頻振動現象對于機器的正常運轉非常不利。當步進電機工作在低速時,一般應采用阻尼技術來克服低頻振動現象,比如在電機上加阻尼器,或驅動器上采用細分技術等。
交流伺服電機運轉非常平穩,即使在低速時也不會出現振動現象。交流伺服系統具有共振抑制功能,可涵蓋機械的剛性不足,并且系統內部具有頻率解析機能(FFT),可檢測出機械的共振點,便于系統調整。
矩頻特性不同
步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,所以其最高工作轉速一般在300~600RPM。交流伺服電機為恒力矩輸出,即在其額定轉速(一般為2000RPM或3000RPM)以內,都能輸出額定轉矩,在額定轉速以上為恒功率輸出。
過載能力不同
步進電機一般不具有過載能力。交流伺服電機具有較強的過載能力。速度過載和轉矩過載能力。其最大轉矩為額定轉矩的三倍,可用于克服慣性負載在啟動瞬間的慣性力矩。步進電機因為沒有這種過載能力,在選型時為了克服這種慣性力矩,往往需要選取較大轉矩的電機,而機器在正常工作期間又不需要那么大的轉矩,便出現了力矩浪費的現象。
運行性能不同
步進電機的控制為開環控制,啟動頻率過高或負載過大易出現丟步或堵轉的現象,停止時轉速過高易出現過沖的現象,所以為保證其控制精度,應處理好升、降速問題。交流伺服驅動系統為閉環控制,驅動器可直接對電機編碼器反饋信號進行采樣,內部構成位置環和速度環,一般不會出現步進電機的丟步或過沖的現象,控制性能更為可靠。
速度響應性能不同
步進電機從靜止加速到工作轉速(一般為每分鐘幾百轉)需要200~400毫秒。交流伺服系統的加速性能較好,從靜止加速到其額定轉速3000RPM僅需幾毫秒,可用于要求快速啟停的控制場合。
3. 什么是編碼器?類型有哪些?
編碼器(encoder)是將信號(如比特流)或數據進行編制、轉換為可用以通訊、傳輸和存儲的信號形式的設備。編碼器把角位移或直線位移轉換成電信號,前者稱為碼盤,后者稱為碼尺。
它是一種信號反饋元器件。編碼器可按以下方式來分類。
按碼盤的刻孔方式不同分類
(1)增量型:就是每轉過單位的角度就發出一個脈沖信號(也有發正余弦信號,然后對其進行細分,斬波出頻率更高的脈沖),通常為A相、B相、Z相輸出,A相、B相為相互延遲1/4周期的脈沖輸出,根據延遲關系可以區別正反轉,而且通過取A相、B相的上升和下降沿可以進行2或4倍頻;Z相為單圈脈沖,即每圈發出一個脈沖。
(2)絕對值型:就是對應一圈,每個基準的角度發出一個唯一與該角度對應二進制的數值,通過外部記圈器件可以進行多個位置的記錄和測量。
按信號的輸出類型分類
可分為:電壓輸出、集電極開路輸出、推拉互補輸出和長線驅動輸出。
以編碼器機械安裝形式分類
(1)有軸型:有軸型又可分為夾緊法蘭型、同步法蘭型和伺服安裝型等。
(2)軸套型:軸套型又可分為半空型、全空型和大口徑型等
以編碼器工作原理分類
可分為:光電式、磁電式和觸點電刷式。
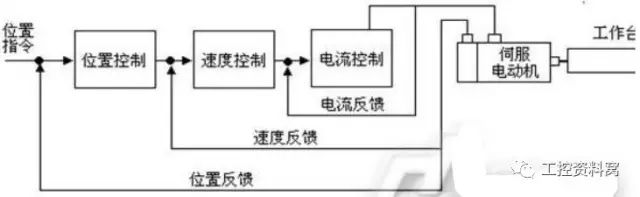
4. 如何實現伺服控制?
伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移,因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。
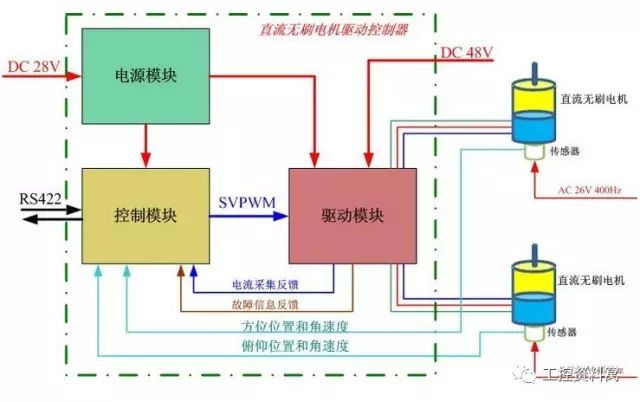
直流伺服電機分為有刷和無刷電機。有刷電機成本低,結構簡單,啟動轉矩大,調速范圍寬,控制容易,需要維護,但維護方便(換碳刷),產生電磁干擾,對環境有要求。因此它可以用于對成本敏感的普通工業和民用場合。
無刷電機體積小,重量輕,出力大,響應快,速度高,慣量小,轉動平滑,力矩穩定。控制復雜,容易實現智能化,其電子換相方式靈活,可以方波換相或正弦波換相。電機免維護,效率很高,運行溫度低,電磁輻射很小,長壽命,可用于各種環境。
交流伺服電機也是無刷電機,分為同步和異步電機,目前運動控制中一般都用同步電機,它的功率范圍大,可以做到很大的功率。大慣量,最高轉動速度低,且隨著功率增大而快速降低。因而適合做低速平穩運行的應用。
伺服電機內部的轉子是永磁鐵,驅動器控制的U/V/W三相電形成電磁場,轉子在此磁場的作用下轉動,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據反饋值與目標值進行比較,調整轉子轉動的角度。伺服電機的精度決定于編碼器的精度(線數)。
調試步驟
1. 初始化參數
在接線之前,先初始化參數。在控制卡上:選好控制方式;將PID參數清零;讓控制卡上電時默認使能信號關閉;將此狀態保存,確保控制卡再次上電時即為此狀態。
在伺服電機上:設置控制方式;設置使能由外部控制;編碼器信號輸出的齒輪比;設置控制信號與電機轉速的比例關系。一般來說,建議使伺服工作中的最大設計轉速對應9V的控制電壓。
2. 接線
將控制卡斷電,連接控制卡與伺服之間的信號線。以下的線是必須要接的:控制卡的模擬量輸出線、使能信號線、伺服輸出的編碼器信號線。復查接線沒有錯誤后,伺服電機和控制卡(以及PC)上電。此時電機應該不動,而且可以用外力輕松轉動,如果不是這樣,檢查使能信號的設置與接線。用外力轉動電機,檢查控制卡是否可以正確檢測到電機位置的變化,否則檢查編碼器信號的接線和設置。
3. 試方向
對于一個閉環控制系統,如果反饋信號的方向不正確,后果肯定是災難性的。通過控制卡打開伺服的使能信號。這是伺服應該以一個較低的速度轉動,這就是傳說中的“零漂”。一般控制卡上都會有抑制零漂的指令或參數。使用這個指令或參數,看電機的轉速和方向是否可以通過這個指令(參數)控制。
如果不能控制,檢查模擬量接線及控制方式的參數設置。確認給出正數,電機正轉,編碼器計數增加;給出負數,電機反轉轉,編碼器計數減小。如果電機帶有負載,行程有限,不要采用這種方式。測試不要給過大的電壓,建議在1V以下。如果方向不一致,可以修改控制卡或電機上的參數,使其一致。
4. 抑制零漂
在閉環控制過程中,零漂的存在會對控制效果有一定的影響,最好將其抑制住。使用控制卡或伺服上抑制零飄的參數,仔細調整,使電機的轉速趨近于零。由于零漂本身也有一定的隨機性,所以,不必要求電機轉速絕對為零。
5. 建立閉環控制
再次通過控制卡將伺服使能信號放開,在控制卡上輸入一個較小的比例增益,至于多大算較小,這只能憑感覺了,如果實在不放心,就輸入控制卡能允許的最小值。將控制卡和伺服的使能信號打開。這時,電機應該已經能夠按照運動指令大致做出動作了。
6. 調整閉環參數
細調控制參數,確保電機按照控制卡的指令運動,這是必須要做的工作,而這部分工作,更多的是經驗,這里只能從略了。
文章來源:網絡








 聯系我們
聯系我們 CRM系統
CRM系統 在線服務
在線服務 官方微信
官方微信
