什么是關節機器人?
關節機器人(Robot joints),也稱關節手臂機器人或關節機械手臂,是當今工業領域中最常見的工業機器人的形態之一。適合用于諸多工業領域的機械自動化作業,比如,自動裝配、噴漆、搬運、焊接等工作。
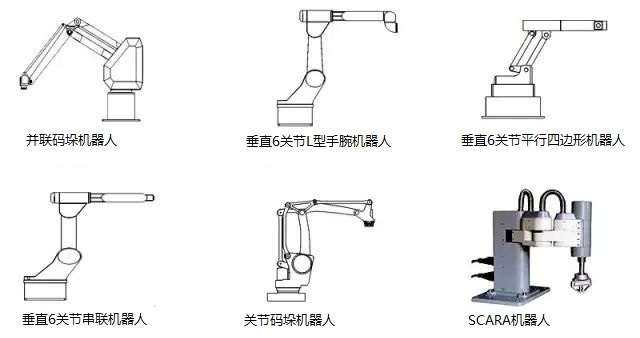
關節機器人的分類
關節機器人的擺動方向有鉛垂方向和水平方向兩種,因此這類機器人又可分為垂直關節機器人和水平關節機器人。
垂直關節機器人如上圖所示,模擬了人類的手臂功能,由垂直于地面的腰部旋轉軸(相當于大臂旋轉的肩部旋轉軸)帶動小臂旋轉的肘部旋轉軸以及小臂前端的手腕等構成。手腕通常由2~3個自由度構成。其動作空間近似一個球體,所以也稱多關節球面機器人。
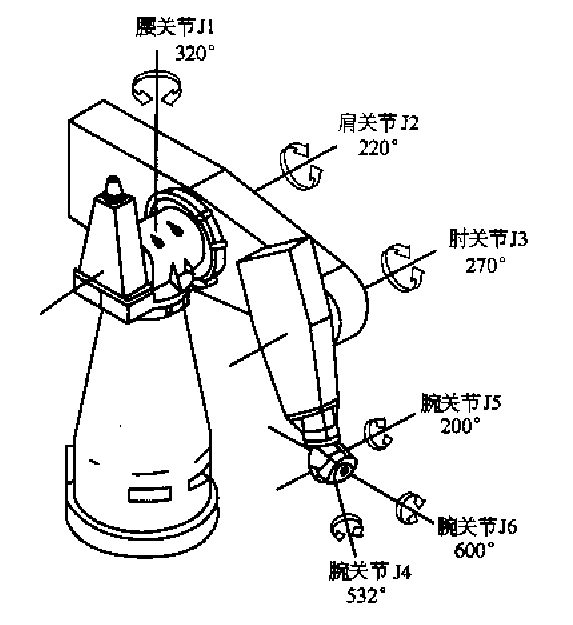
其優點是可以自由地實現三維空間的各種姿勢,可以生成各種復雜形狀的軌跡。相對機器人的安裝面積。其動作范圍很寬。
缺點是結構剛度較低,動作的絕對位置精度磨較低。它廣泛應用于代替人完成裝配作業、貨物搬運、電弧焊接、噴涂、點焊接等作業場合。
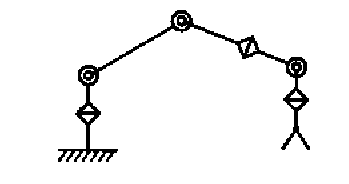
水平關節機器人如上圖在結構上具有串聯配置的二個能夠在水平面內旋轉的手臂,其自由度可以根據用途選擇2~4個,動作空間為一圓柱體。
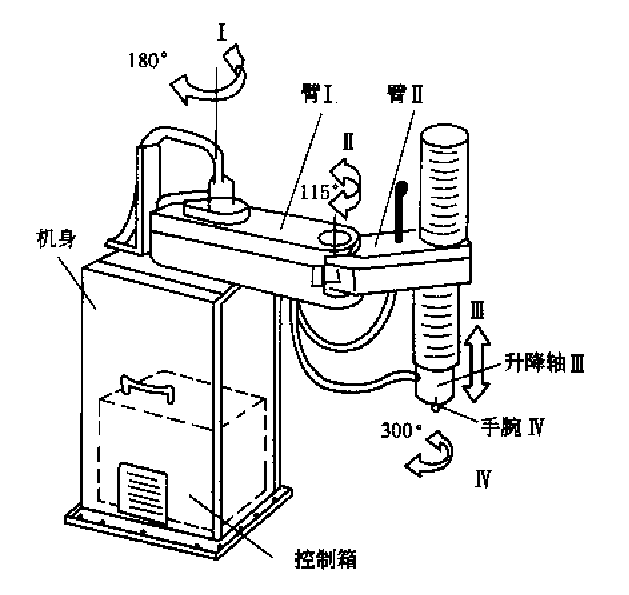
水平關節機器人的優點是在垂直方向上的剛性好,能方便地實現二維平面上的動作,在裝配作業中得到普遍應用。
此外,還可以 按照關節機器人的工作性質分類,可分為很多種,比如:搬運機器人,點焊機器人,弧焊機器人,噴漆機器人,激光切割機器人等。
關節機器人的優缺點
關節機器人的優點
1)結構緊湊,工作范圍大而安裝占地面積小。
2)具有很高的可達性。關節坐標式機器人可以使其手部進入像汽車車身這樣一個封閉的空間內進行作業,而直角坐標式機器人不能進行此類作業。
3)因為沒有移動關節,所以不需要導軌。轉動關節容易密封,由于軸承件是大量生產的標準件,則摩擦小,慣性小,可靠性好。
4)所需關節驅動力矩小,能量消耗較小。
5)代替很多不適合人力完成、有害身體健康的復雜工作。
關節機器人的缺點
1)肘關節和肩關節軸線是平行的,當大、小臂舒展成一直線時,雖能抵達很遠的工作點,但機器人的結構剛度比較低。
2)機器人手部在工作范圍邊界上工作時有運動學上的退化行為。
3)價格高,導致初期投資的成本高。
六軸關節機器人的運動方式
六軸工業機器人作為工業機器人中應用中最為廣泛的類型,具有高靈活性、超大負載、高定位精度等眾多優點。那六個軸的各自運動路徑如何,以FANUC robot R-2000 iB來進行詳細解讀。
J1旋轉(S軸)
J2下臂(L軸)
J3上臂(U軸)
J4手腕旋轉(R軸)
J5手腕擺動(B軸)
J6手腕回轉(T軸)
詳細了解六關節機器人詳細運動方式和其應用領域請戳下方視頻:
六軸關節機器人的機械結構
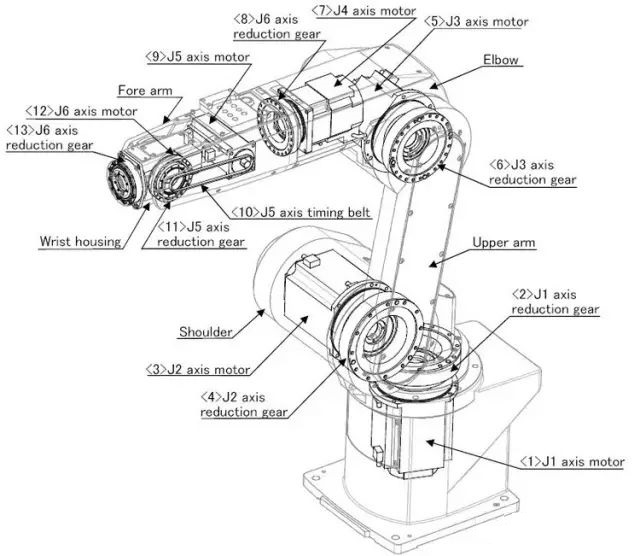
上圖為常見的六軸關節機器人的機械結構,六個伺服電機直接通過減速器、同步帶輪等驅動六個關節軸的旋轉。六軸工業機器人一般有6個自由度,常見的六軸工業機器人包含旋轉(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(R軸)、手腕擺動(B軸)和手腕回轉(T軸)。6個關節合成實現末端的6自由度動作。
作為高自由度的復雜機械結構,下面通過庫卡機器人為大家展示機器人精彩的內部機械結構。
詳細動圖請戳下方視頻:
文章來源:數控自動化








 聯系我們
聯系我們 CRM系統
CRM系統 在線服務
在線服務 官方微信
官方微信
