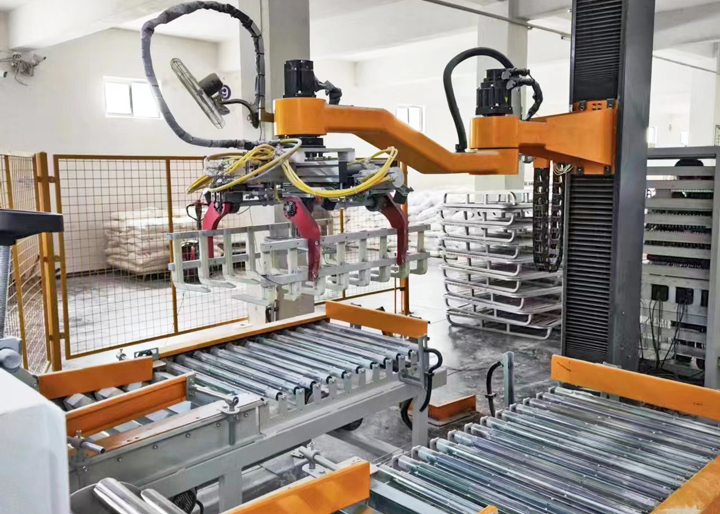
一、應(yīng)用介紹
立柱式機(jī)器人碼垛機(jī)主要是通過操控使用運(yùn)動(dòng)控制器或機(jī)器人示教器控制搬運(yùn)碼垛。立柱機(jī)器人碼垛機(jī)每小時(shí)抓取300-500次,可選擇單抓手和雙抓手,速度和質(zhì)量遠(yuǎn)高于人工碼垛,操作精度高,工作范圍大。碼垛機(jī)占地面積小,動(dòng)作靈活,每一臺(tái)機(jī)器人都有獨(dú)立的控制系統(tǒng),保證了作業(yè)精度。相比機(jī)器人碼垛機(jī)立柱式機(jī)器人更加經(jīng)濟(jì)實(shí)惠,能達(dá)到成本效用化,且主要構(gòu)成零配件少,維持費(fèi)用低,電源消耗低,結(jié)構(gòu)簡(jiǎn)單故障率低,易于保養(yǎng)維護(hù)。
二、工藝要求
2、響應(yīng)要求高、運(yùn)行平穩(wěn),無抖動(dòng)。

三、方案優(yōu)勢(shì)








 聯(lián)系我們
聯(lián)系我們 CRM系統(tǒng)
CRM系統(tǒng) 在線服務(wù)
在線服務(wù) 官方微信
官方微信
